



Academics at US universities Northeastern in Boston and Carnegie Mellon in Pittsburgh are developing a flying robot that can automatically inspect, analyse and assess damage to infrastructure.
Named the Aerial Robotic Infrastructure Analyst (ARIA), the system uses a lightweight rotating laser scanner mounted on a micro air vehicle (MAV) to inspect a bridge or a building. The intelligent system then utilises state-of-the-art planning, modelling and analysis software to automatically identify issues, track projects’ progress, and assess the need for further action.
Funded by the National Science Foundation’s National Robotics Initiative, the research is expected to greatly improve the speed and reduce the cost of inspecting infrastructure.
Speaking to Northeastern’s website Jerome Hajjar, chair of civil and environmental engineering at the university, says: “Consider bridge inspections. Until now, they were predominantly done by people with cameras crawling on stretches of scaffolding that would be built for the purpose, taken down, and then reconstructed a little further along the bridge – an expensive process.
“The MAVs, which are programmed to fly and navigate autonomously, can safely and efficiently address places that are difficult or dangerous to reach as well as those that have to be inspected repeatedly.”
The MAVs themselves are around 50cm across and in addition to the laser scanner they are equipped with three video cameras, a GPS to monitor its position and wireless communications to transmit data to an operator on the ground.
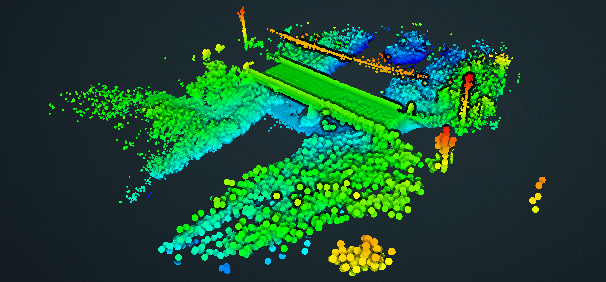
An overview of a 3-D model of a bridge created by the autonomous ARIA robot using its unique sensors. Image: Varun Kasireddy, Carnegie Mellon University
However, this is much more than an inspection drone. Hajjar is developing algorithms that will allow the robots to determine the nature and the severity of any damage located. The ARIA will also be able to compare any damage to previous images and scans to provide a condition report from excellent to failed.
Hajjar explains: “We want to know not simply whether the damage is there but if it matters. That’s why the simulation is so important. In the case of a bridge, for example, the system would simulate the behaviour of a bridge subjected to loads. How much does the bridge deflect under particular loads? How much stress on the members is too much? How will the damage the MAV has detected affect that?”
Hajjar aims to continue developing the ARIA so that it can start making automatic repairs once it has discovered a problem.
He continues: “I think modest repairs are actually quite feasible. The most common repair is to drill a hole in the crack tip, which changes what we call the ‘stress concentration’ from infinite, meaning that it’s going to keep propagating, to a much more dulled-out lower-stress version. It enables the bridge to handle the fatigue stresses for a much longer time.”
Related drone articles
Costain sets up framework for drone suppliers
Crossrail: Drones aren’t tomorrow’s technology
Drones scan California site to monitor worker productivity

The MAVs, which are programmed to fly and navigate autonomously, can safely and efficiently address places that are difficult or dangerous to reach as well as those that have to be inspected repeatedly.– Jerry Hajjar, Northeastern University





